廣州榮旭智能裝備有限公司
賣家服務時間
9:00--17:00
UM113自動焊接機器人碼垛機器人
保持焊槍位置和姿勢不變的情況下,可以改變機器人的姿勢;
7軸機器人的復雜示教,通過運用協調技術,實現簡單的手動操作
將焊接電纜內藏于第7軸機構中,示教作業時不需要擔心電纜與夾具及工件的干涉。
| AXOP | |||||
| 操作盒 | |||||
| NO. | 品名 | 規格 | 型號 | 推薦保有量 | 備注 |
| 1 | 按鈕開關(非常停止) | HA1E-V2S2R-TK2354 | 4250-134 | 1 | |
| 2 | 選擇開關 | AH164-P2B11 | 4250-125 | 1 | |
| 3 | 燈光式按鈕開關(紅)(停止) | AH164TLR11E3 | 4250-069 | 1 | |
| 3-1 | LED燈(紅) | AHX695-24R | 4533-405 | (1) | |
| 4 | 燈光式按鈕開關(綠)(啟動,運轉準備) | AH164TLG11E3 | 4250-071 | 2 | |
| 4-1 | LED燈(綠) | AHX695-24G | 4533-406 | (2) | |
| 5 | 防水蓋 | AHX668 | 5096-051 | 1 | |
| 6 | 保護套 | AHX669 | 5096-185 | 2 | |
| 7 | 外殼 | L9111B01 | L9111B01 | 1 | |
| 8 | 面板 | L9111B02 | L9111B02 | 1 | |
| 9 | 電路板 | L9111C00 | L9111C00 | 1 | |
| 10 | 電纜(AXOP-0005用) | L21458C00 | L21458C00 | 1 | 5M |
| 電纜(AXOP-0010用) | L21458D00 | L21458D00 | (1) | 10M | |
| 電纜(AXOP-0015用) | L21458E00 | L21458E00 | (1) | 15M | |
| 11 | 短路插頭 | L9111G00 | L9111G00 | 3 | |
構造 | 垂直多關節型 | ||
軸數 | 7 | ||
手臂最大可搬重量 | 4 kg | ||
位置重復精度 | ±0.08mm(注1) | ||
驅動方法 | AC伺服馬達 | ||
驅動容量 | 3550W | ||
位置反饋 | 絕對值編碼器 | ||
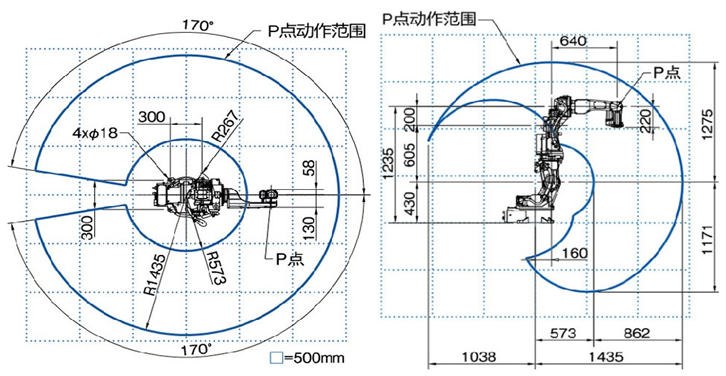
動作范圍 | 基本軸 | J1(旋轉1) | ±170° |
J2(前后) | -145°~+70° | ||
J7(旋轉2) | ±90° | ||
J3(上下) | -170°~+142.6° | ||
手臂軸 | J4(回轉) | ±155° | |
J5(擺動) | -45°~+225°(注2) | ||
J6(扭轉) | ±205°(注2) | ||
最大速度 | 基本軸 | J1(旋轉1) | 3.66rad/s{210°/s} |
J2(前后) | 3.66rad/s{210°/s} | ||
J7(旋轉2) | 3.14rad/s{180°/s} | ||
J3(上下) | 3.66rad/s{210°/s} | ||
手臂軸 | J4(回轉) | 7.33rad/s{420°/s} | |
J5(擺動) | 7.33rad/s{420°/s} | ||
J6(扭轉) | 10.5rad/s{600°/s} | ||
手臂負荷能力 | 允許扭矩 | J4(回轉) | 10.1N.m |
J5(擺動) | 10.1N.m | ||
J6(扭轉) | 2.94N.m | ||
允許慣性矩 | J4(回轉) | 0.38kg.m2 | |
J5(擺動) | 0.38kg.m2 | ||
J6(扭轉) | 0.03kg.m2 | ||
機器人動作范圍截面面積 | 2.57m2 ×340° | ||
使用環境條件 | 溫度:0~45℃、濕度:20~80%RH(無結露) | ||
本體重量 | 189kg | ||
上部手臂可載重量 | 10kg(注3) | ||
安裝方法 | 地面(注4) | ||
本體顏色 | 白色(芒賽爾色標10GY9/1) | ||
注1:位置重復精度遵照JIS B 8432 是標準的工具中心點(TCP)測量值
注2:第6軸的動作范圍可能因第5軸的姿勢而受到限制
注3:上部手臂可搬重量隨著最大可搬重量可以變化
注4:需要側掛、吊裝規格時請咨詢我司銷售人員
規格參數
行業分類:
機械及行業設備
產品類別:
品 牌:
OTC
規格型號:
庫 存:
200
生 產 商:
產 地:
中國廣東省廣州市

快速創建集企業介紹、產品服務、直播等一體的個性旺鋪

升級成企業號幫助企業搭建社交移動互聯網智能營銷平臺

自助開通商城,將智能營銷平臺、直播系統流量轉化成交


